


Категория: Бланки/Образцы
Основная часть гирокомпаса – ЧЭ (гиросфера), имеющая геометрическую (главную) ось. В процессе вращения гирокомпаса вместе с поверхностью Земли главная ось устанавливается в плоскости истинного меридиана, а на движущемся судне – в плоскости гироскопического меридиана. Угол между ПИМ и ПГМ называется поправкой ГК и обозначается ?ГК. Направления отсчитываются от северной части ГМ. Угол между северной частью плоскости ГМ и ДП судна называется ГКК. Угол между северной частью ПГМ и вертикальной плоскостью, проходящей через ЧЭ компаса и пеленгуемый объект, называется гироскопическим пеленгом (ГКП). ГКК и ГКП отсчитываются от северной части ГКМ по часовой стрелке от 0 до 360°.
Направляющий момент ГК намного больше, чем у МК и не зависит от магнитного поля Земли, однако, с увеличением широты он уменьшается и в высоких широтах ГК работает ненадёжно.
Если северная часть ГКМ отклонена к востоку от северной части ИМ, то ?ГК – восточная или положительная и наоборот.
?ГК состоит из двух частей:
- постоянная на всех курсах погрешность в показаниях ГК. Может быть уменьшена или исключена путём разворота основного прибора гирокомпаса относительно основания на соответствующий угол.
- скоростная девиация, возникающая из-за при движении судна поперёк направления вращения Земли из-за Кориолисова ускорения и зависящая от курса, скорости судна и широты его местонахождения.
R – радиус Земли.
? – угловая скорость вращения Земли.
V – скорость судна в узлах.
? – широта местонахождения судна.
Величина скоростной девиации обычно определяется не по формулам, а по таблице или номограмме, приложенной к гирокомпасу.
Знак скоростной девиации зависит только от курса судна.
В современных моделях гирокомпасов обычно имеются ручные или автоматические корректоры по скорости судна и широте для исключения .
Следует иметь в виду, что при качке судна и маневрировании поправка гирокомпаса меняется. При маневрировании появляются баллистические погрешности 1 и 2 рода подробнее. Изменение поправки на качке незначительно, а при резком маневрировании погрешность 2 рода может достигать 2-3 градуса в течение 20-40 минут. Погрешность 1 рода достигает максимума в момент окончания маневра и держится 15-20 минут. После этого гирокомпас приходит в меридиан и поправка принимает прежнее значение. Величины обеих поправок особенно значительны в высоких широтах. Поправка гирокомпаса определяется теми же способами, что и для магнитного компаса, после чего вычисляется постоянная часть.
Контроль за работой компасов в море.
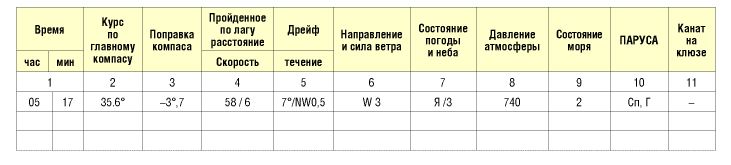
Вахтенный штурман должен использовать любую возможность для определения поправок магнитного и гирокомпаса. Кроме того он должен постоянно сличать их показания. МКУБ требуется журнал сличения компасов. Показания магнитного и гирокомпаса на каждом новом курсе также записываются в судовой журнал.
Для определения поправки одного из компасов, если поправка другого известна, служат выражения:
Следует иметь в виду, что гирокомпас в любой момент может выйти из строя, и, если не заметить разницы в показаниях, судно может уйти с заданного курса. Все определения поправок компасов записываются в компасный журнал. При определении поправок компасов при помощи одного ориентира место судна необходимо определять способами, свободными от ошибок в поправке компаса (2 горизонтальных угла, 2-3 дистанции и т.д.). Следует иметь в виду, что ошибка в поправке компаса всегда характерно проявляется при смене ориентиров, выбираемых для пеленгования.
Перевод и исправление румбов.
Определение скорости судна и пройденного расстояния в море. Морские единицы скорости. Определение скорости на мерной линии. Измерение пройденного расстояния в море. Определение поправки и коэффициента лага.
















Курс судна - угол между диаметральной плоскостью судна и направлением на север. Измеряется в градусах по часовой стрелке от 0° до 359°.
Истинный курс судна (ИК) - это угол, заключенный между северной частью истинного меридиана (линии NS ) и диаметральной плоскостью судна (направлением носа судна). Истинный курс отсчитывается по часовой стрелке от 0 до 360°.
Магнитный курс (МК) - угол между магнитным северным меридианом N и линией курса.
Действие магнитного компаса основано на свойстве магнитной стрелки занимать определенное положение в земном магнитном поле, а именно: северный конец магнитной стрелки компаса указывает на северный магнитный полюс земли N. Магнитные и географические полюсы не совпадают. Направление, проходящее через ось магнитной стрелки, называется магнитным меридианом. Магнитный меридиан не совпадает с направлением истинного меридиана.
Компасным курсом (КК) называется угол в плоскости истинного горизонта, отсчитываемый от нордовой час ти компасного меридиана по часовой стрелке до носовой части диаметральной плоскости судна. Компасные курсы и пеленги могут быть в пределах от 0 ° до 360°.
Магнитное склонение ( d) - угол между северной частью истинного меридиана и северной частью магнитного меридиана, называется магнитным склонением. Склонение отсчитывается от северной части истинного меридиана к востоку или западу от 0 до 180°. Восточному, или остовому, склонению присваивается знак плюс, западному, или вестовому, - знак минус. Магнитное склонение для данного места непостоянно, оно все время увеличивается или уменьшается на небольшую постоянную вели чину. Величина склонения в данном районе плавания, годовое его увеличение или уменьшение в год, к которому приведено склонение, указываются на навигационных картах.
Девиацией магнитного компаса (?) называют г оризонтальный угол, на который плоскость компасного меридиана отклоняется от плоскости магнитного меридиана(разница межку Nм и Nк). На каждом курсе девиация у судовых компасов различна. Это объясняется тем, что при изменении курса меняется положение судового железа относительно магнитных стрелок компаса. Кроме того, после поворота судна судовое железо частично перемагничивается, что также приводит к изменению магнитного поля судна.
Поправка магнитного компасса - алгебраическая сумма девиации и магнитного склонения, на величину которой компасные направления отличаются от истинных:
ПОПРАВКА КОМПАСА Угол между истинным и компасным направлениями, представляющий собой алгебраическую сумму магнитного склонения и девиации. Выражается разностью между компасным и истинным (снятым с карты) направлениями на какой-либо маяк, навигационный знак и т. п. Проще всего определить П. К. когда судно пересекает створ или идет по створу маяков либо знаков, нанесенных на карту. П. К. зависит от курса, т. к. с его изменением меняется девиация магнитного компаса. Для гирокомпаса поправка постоянна на всех курсах, т. к. он не подвержен влиянию магнитного поля судна. П. к. определяют и методами мореходной астрономии, при этом компасный пеленг Солнца или звезд берут по компасу, а истинные направления на них в данный момент времени рассчитывают по формулам.
Морской энциклопедический справочник. — Л. Судостроение. Под редакцией академика Н. Н. Исанина. 1986 .
Смотреть что такое "ПОПРАВКА КОМПАСА" в других словарях:ПОПРАВКА КОМПАСА — угол между истинным и компасным меридианами; общая величина (d + δ), представляющая собою алгебраическую сумму склонения и девиации компаса. Самойлов К. И. Морской словарь. М. Л. Государственное Военно морское Издательство НКВМФ Союза ССР,… … Морской словарь
поправка компаса — kompaso pataisa statusas T sritis Standartizacija ir metrologija apibreztis Pataisa kompaso matavimo paklaidai panaikinti. atitikmenys: angl. compass correction vok. Kompasskorrektion, f rus. поправка компаса, f pranc. correction du compas, f … Penkiakalbis aiskinamasis metrologijos terminu zodynas
поправка компаса — kompaso pataisa statusas T sritis fizika atitikmenys: angl. compass correction vok. Kompa?korrektion, f rus. поправка компаса, f pranc. correction du compas, f … Fizikos terminu zodynas
Поправка магнитного компаса — угловая величина отклонения компасного меридиана от истинного. Показания магнитного компаса (курс, пеленг) исправляются алгебраической суммой углов склонения и девиации. Служит также для перевода истинных курсов (пеленгов) в компасные. EdwART.… … Морской словарь
поправка — сущ. ж. употр. сравн. часто Морфология: (нет) чего? поправки, чему? поправке, (вижу) что? поправку, чем? поправкой, о чём? о поправке; мн. что? поправки, (нет) чего? поправок, чему? поправкам, (вижу) что? поправки, чем? поправками, о чём? о… … Толковый словарь Дмитриева
регулирование компаса — поправка компаса Процесс противодействия влиянию магнетизма судна на положение компаса при помощи корректирующего устройства, снижающего девиацию компаса. [ГОСТ Р 52682 2006] Тематики средства навигации, наблюдения, управления Синонимы поправка… … Справочник технического переводчика
КОМПАС — прибор для определения горизонтальных направлений на местности. Применяется для определения направления, в котором движется морское, воздушное судно, наземное транспортное средство; направления, в котором идет пешеход; направления на некоторый… … Энциклопедия Кольера
компас — прибор для определения сторон горизонта и измерения на местности магнитных азимутов, напр. при движении по маршруту. Осн. части компаса – магнитная стрелка, свободно вращающаяся на острие иглы, лимб с градусными делениями, а также (в некоторых… … Географическая энциклопедия
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА — установление фактич. места судна по наблюдениям береговых ориентиров визуально или с помощью радиолокаторов, по небесным светилам, по пеленгам радиомаяков, с помощью наземных радионавиг. систем или по спутниковым радионавиг. системам (РНС) с… … Морской энциклопедический справочник
Kompasskorrektion — kompaso pataisa statusas T sritis Standartizacija ir metrologija apibreztis Pataisa kompaso matavimo paklaidai panaikinti. atitikmenys: angl. compass correction vok. Kompasskorrektion, f rus. поправка компаса, f pranc. correction du compas, f … Penkiakalbis aiskinamasis metrologijos terminu zodynas
 Каждый штурман ежедневно сталкивается с «Compass Observation Book». Давайте ка разберемся, ЧТО это такое и ЗАЧЕМ это нужно?
Каждый штурман ежедневно сталкивается с «Compass Observation Book». Давайте ка разберемся, ЧТО это такое и ЗАЧЕМ это нужно?
Compass Observation Book – это журнал учета поправок магнитного и гиро компасов. Возникает вполне закономерный вопрос: «Как часто нужно заполнять этот журнал? И вообще, что там писать?»
Разберемся по порядку. Как часто. – На этот вопрос есть четкие указания в известном многим пособии – «Bridge Procedures Guide», сокращенно BPG (советский аналог – РШС – Рекомендации по организации штурманской службы на морских судах). Также подобные указания наверняка присутствуют в MASTER’S STANDING ORDERS и если хорошенько поискать, то найдете и в COMPANY SAFETY MANAGEMENT PROCEDURES в разделе Watch keeping или похожем по смыслу. Как видите, дело серьезное и рассчитывать поправку таки придется :). Чтобы не быть голословным, привожу пару цитат:
BPG Раздел 3. Duties of the officer of the watch. Пункт 3.2.5.2. Routine test and checks. Gyro and magnetic compass errors should be checked and recorded at least once a watch, where possible, and after any major course alternation.
BPG Раздел 4. Operation and maintenance of bridge equipment. Пункт 4.6.3. Compass errors. Magnetic and Gyro compass errors should be checked and recorded each watch, where possible, using either azimuth or transit bearings. [Цитаты из BPG 4-th edition 2007].
Попросту говоря, поправку штурман обязан рассчитывать и вносить в журнал минимум один раз за вахту, если предоставляется возможность. Особое внимание обращаю на оговорку «…если предоставляется возможным». Именно здесь и начинаются первые ошибки. Очень часто встречал вместо поправки подобную запись: «Sky overcast». И аргумент у штурмана на первый взгляд железный « Ну тогда видно, что я пытался рассчитать, но не смог, т.к. тучки были». Так вот, подобный подход обречен на провал, т.к. в таком случае запись в журнал должна делаться каждую вахту каждым помощником (т.е. минимум 6 раз в сутки), что по правде говоря, я не встречал никогда. Чаще всего вы увидите по датам, что поправка то записана, то записано что «…были тучки…» или вовсе пару дней, а иногда и недель, нет никаких записей. И если Port State Control Officer или любой другой инспектор захочет к вам придраться, то сделает это с легкостью. Т.к. явно видно, что поправка не рассчитывается раз за вахту, а дай бог хотя бы раз в сутки. Более грамотно будет вносить в журнал лишь рассчитанные поправки. А если в какой-то период информация отсутствует, то вы с лёгкостью прикроетесь той самой оговоркой «…если предоставляется возможным» = «…where possible…». А доказательством того, что не было возможности, служат ваши записи в Bridge Log Book о состоянии погоды, которые делаются каждую вахту. При таком подходе вам никто никогда не предъявит, что вы не следуете правилам заполнения «Compass Observation Book». Как однажды сказал мне компанейский аудитор во время внутреннего ISM audit – «…this is not weather log book.». Так что не создавайте доказательств против самих себя и пишите только, что нужно.
С вопросом как часто делать запись мы разобрались, давайте теперь разберемся, что ж именно нужно писать.
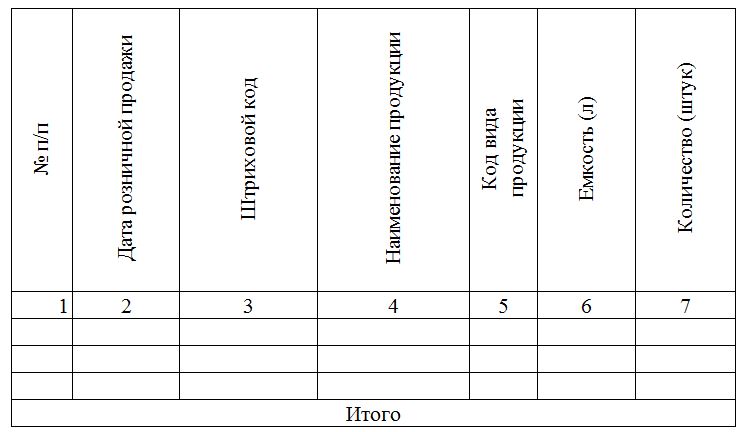
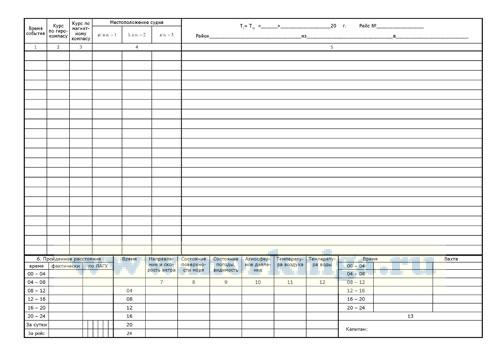
Внутри «Compass Observation Book» вы найдете следующую таблицу:
Колонки 1, 2, 3. Записываем Гринвичское время и дату обсервации, а также позицию судна.
Колонка 4. Ship’s Head. Записываем курс, которым следовало судно на момент обсервации. 4.1 Gyro – гирокомпасный курс, 4.2 Standard – магнитный курс. 4.3 Steering – курс по тому компасу, по которому в данный момент следуете. К примеру, если идете на авторулевом по гирокомпасу, то записываете гирокомпасный курс, т.е. значение 4.3 = 4.1. Признаюсь, один раз мне попался коллега, который отчаянно доказывал мне, что есть на судне еще третий тип компаса, который и называется steering compass. Правда найти этот невиданный прибор и показать его мне он так и не смог. Наверно потому что его попросту не существует :). Внося данные в колонку 4, вы обозначаете, по какому из компасов вы следуете в данный момент: по магнитному или же по гиро.
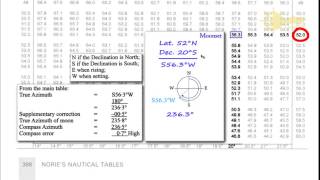
Колонка 5. Bearing. 5.1 True – истинный пеленг на объект. Для его расчета вам потребуется небезызвестный Brown’s Nautical Almanac и Norie’s Nautical Tables. Как вариант можно еще посчитать поправочку по «Rapid Sight Reduction Tables for Navigation» правда, точность тогда сводится к целым градусам. Также можете увидеть, как коллеги считают поправку по программам (их множество, самая популярная, пожалуй, – sky mate). Если вам лень считать по таблицам, то не поленитесь хотя бы убедиться что программа, которую вы используете, лицензирована для вашего судна или судовладельца. Тогда в случае проверки вы сможете ссылаться на расчеты по этой программе, но если ваш «Sky mate» Licensed to: -=skyhacker1986=- или что-то в этом роде, то лучше даже не заикайтесь, что считаете по программе, и может вам повезет. А вообще будьте готовы к тому, что придется на глазах у инспектора повторно рассчитать вашу прошлую поправку, такое бывает, хоть и Очень редко. В своих уроках Евгений (автор проекта, если кто не понял) более чем подробно и очень доступно растолковал, как именно считать поправку. Признаюсь, что мне в академические годы эти знания дались очень нелегко – сгрыз не один булыжник гранита науки, пока разобрался что к чему. Так что не поленитесь и просмотрите соответствующий видео урок.
Колонки 5.2 и 5.3.
Гиро пеленг и магнитный пеленг на выбранный объект. На первый взгляд все очень просто, и непонятно, где можно ошибиться. Но прежде чем вносить данные в колонку 5.3 Standard bearing убедитесь, что есть практическая возможность запеленговать ориентир при помощи магнитного компаса. Часто встречал системы, позволяющие выводить на курсоуказатель показания магнитного компаса, тогда все понятно, переключились на магнитный компас и взяли магнитный пеленг. А если такой возможности нет, и вы по факту не способны взять магнитный пеленг на объект, тогда лучше ничего не писать в данной колонке – ставьте прочерк.
Колонка 6
. Object. Записываете название небесного светила, по которому рассчитываете поправку. Чтобы придать индивидуальности вашим записям, можете также рядом указать символ объекта. Данные символы можете найти в Brown’s Nautical Almanac на стр. 5. Стоит отметить также, что поправку можно считать не только по светилам, но и по створам, к примеру, или стоя в порту – по линии причала.
Колонка 7.
Error. Вот мы и подошли к основной части журнала, а именно к самим поправкам. Gyro error = True bearing – Gyro bearing [7.1=5.1-5.2]. Расчет Standard error: если вы брали магнитный пеленг на ориентир, тогда расчет аналогичный предыдущему: Standard error = True bearing – Standard bearing [7.2=5.1-5.3]. Если же в колонке 5.3 вы поставили прочерк, тогда поправка рассчитывается путем сличения истинного курса и магнитного. Истинный курс получаем, прибавляя к гиро курсу поправку гиро компаса со своим знаком: [4.1+7.1]. Поправки магнитного компаса получаем, отнимая от истинного курса магнитный: [4.1+7.1-4.2]. В колонке 7.3 записываем поправку того компаса, по которому в данный момент следует судно (аналогично колонке 4.3).
Колонка 8. Variation. В переводе на русский – магнитное склонение, берете с карты. Также встречаются случаи, когда variation снимают с показаний GPS индикатора. Здесь уже речь идет об уровне доверия к источникам информации. Сослаться на данные карты можно с чистой совестью – карты в большинстве случаев публикуются UKHO (United Kingdom Hydrographic Office), а вот к данным магнитного склонения взятых по GPS доверия меньше, т.к. источник у них не столь известен, если известен вовсе.
Колонка 9.1 Standard Deviation. Перевод очевиден – девиация магнитного компаса. Сразу на ум приходит таблица девиации, но не спешите радоваться. Как показывает практика, то данные между реальной девиацией и указанной в таблице весьма различны. Причин на то масса, начиная от влияния магнитного поля груза на компас и заканчивая банальным человеческим фактором при составлении таблицы девиации. Лично видел несколько раз на судах таблицы, где все значения = нулю, т.е. девиации не было вовсе, что в априори не возможно. А вот громоздких печатей и красивых размашистых росписей на таблице было предостаточно, только вензелей не хватало и гербовой печати Королевы Англии :). Как же быть, спросите вы? Так ответ очевиден, девиацию мы рассчитаем сами. Вспоминаем курс навигации, где рассказывали, что поправка магнитного компаса состоит из магнитного склонения и девиации. Таким образом, получаем, что Deviation = Standard Error – Variation [9.1=7.2-8]. Если на судне расчеты велись правильно, то по прошествии некоторого времени, можно составить собственную таблицу девиации, доверие к которой прямо пропорционально доверию к расчетам ваших коллег. Я искренне желаю, чтобы жизнь вас не поставила в условия, при которых значение девиации магнитного компаса будет иметь существенное значение для безопасности мореплавания. Но все равно, все расчеты и записи следует производить максимально грамотно, иначе зачем вы читаете эту статью :)?
Колонка 9.2. Если судно следует по магнитному компасу, тогда значение равняется предыдущему [9.2=9.1]. Если вы следуете по гирокомпасу, тогда речь идет о скоростной и широтной девиациях, учет и корректировка которых производится, как правило, гирокомпасом автоматически. Лично я ставлю в этой колонке прочерк, т.к. каким бы ни было значение – оно является частью уже рассчитанной Gyro Error.
Колонка 10. Heel. Речь идет о крене судна, если вас покачивает – пишите «+ -» пару градусов.
Колонка 11.
Remarks. Укажите, с какого пелоруса вы брали пеленг (Port Repeater / Starboard Repeater). Как ни удивительно, но и здесь можно ошибиться, например судно следует строго на север, пеленгуете звезду справа на траверзе, то правильно будет указать, что пеленг вы брали с пелоруса на правом крыле, а не на левом :). Многим это покажется очевидным, но поверьте, что бывали случаи подобных записей. Можете сами убедиться, полистав журнал и изучив записи предшественников и поймете насколько все запущенно :). По правде говоря, именно это и сподвигло меня на написание данной статьи. Также не делайте глупых ошибок, таких, как пеленгование Солнца в полдень на судне с крытыми крыльями, т.к. это явно невозможно и ставит под сомнение все записи в журнале равно, как и компетентность сделавших их. А что может быть для штурмана страшнее обоснованного обвинения в некомпетентности. Так что прежде чем поставить свою подпись напротив любой записи в журнал, убедитесь, что она верна.
Ну и раз уж зашла речь о подписях, то самое время поставить свой красивый автограф в колонке 12.Observer и закрыть журнал до следующей вахты при условии «…если предоставляется возможным» = «…where possible…».
P.S. К статье прилагаю файл – Azimuth Calculation. В нем вы найдете бланки таблиц, для расчета поправки гирокомпаса. Таблицы созданы на основе алгоритма расчета приведенного в Brown’s Nautical Almanac на стр. 12 и 13. Также для удобства добавлены строки для продолжения расчета поправки по Norie’s Nautical Tables (ABC tables). Распечатайте бланки, заведите отдельную папку и подшивайте заполненные бланки. Также можете попрактиковать навыки красноречия и убедить коллег навигаторов пользоваться вашим нововведением.
С уважением, ко всем тем, кто дочитал статью до конца :)
Гусев Валерий
Пост дополнен Евгением Богаченко после комментариев.
Как я понял вопрос, хочется определиться с тем, насколько обязательно рассчитывать поправку компаса и вести Журнал поправок компаса.
Первое, умение делать поправку требуется STCW. Под эти требования попадают офицеры, ответственные за несение навигационной вахты на судах валовой вместимостью 500т и более. Т.е. теоретически при любой проверке могут потребовать сделать расчет поправки компаса.
Но вопрос не в этом. Поэтому второе. Поправки должны быть правильно применены (учтены) к курсам и пеленгам. И тут вопрос, а как их учитывать, если не рассчитывать? А если не вести журнал, то как доказать, что учет поправок проводился?

Но капитаны и старпомы тоже не должны расслабляться. Так как к ним не менее жесткие требования. Не в упрек, так как я понимаю, что у всех много работы. Однако я не думаю, что каждый капитан и старпом сможет сходу рассчитать поправку компаса.

Ну и напоследок. При принятии вахты. среди всех пунктов, которые должны быть учтены, есть упоминание о поправках гиро- и магнитного компасов. Опять же, можно уметь рассчитывать поправку, можно устно передавать её величину. Но вот упрется какой-то проверяющий и докажи ему потом без Журнала поправок компаса, что всё делалось.

Понимаю, что можно взять папку и собирать туда листики с расчетами. При этом, не заполняя журнал. Тут уже добавить нечего. Так как конкретно международного требования наличия на мостике Журнала поправок компаса я не встречал. Но есть Компанейские нормативы, зачастую там можно найти это требование. Да и стараться кому-то доказать, что вот это вот так, а другое не надо – лишняя трата нервов и времени. На судне столько записей делается с запасом, столько лишних процедур и отчетов, чтоб прикрыть одно место, что Журнал поправки компаса меркнет на их фоне.
Вырезки текстов привел из STCW 2011 года. Дополнительно выкладываю на скачивание страницы, откуда брал эти тексты.
Автор: Евгений Богаченко
В соответствии с международными стандартами,
точность любого установленного на судне гирокомпаса должна отвечать следующим
минимальным требованиям.
Установившаяся погрешность
гирокомпаса — это разность отсчетов истинного и установившегося курсов.
Установившийся курс — среднее значение из 10 отсчетов, взятых один за другим
через 20 мин после того, как гирокомпас пришёл в меридиан. Считается, что
гирокомпас пришел в меридиан, если разность между значениями любых двух отсчетов,
взятых через 30 мин, не превышает ±0,7°. Установившаяся погрешность на любом
курсе в широтах j £ 60° не должна превышать ±0,75° sec j. Средняя
квадратическая погрешность разностей между отдельными отсчетами курса и его
средним значением должна быть менее 0,25° sec j.
Стабильность
установившейся погрешности гирокомпаса от пуска к пуску должна быть в
пределах 0,25° sec j. Стабильность установившейся погрешности
основного прибора гирокомпаса должна
быть в пределах ±1° sec j в обычных условиях эксплуатации и
вариациях магнитного поля, которые может испытывать судно.
Требуется
также, чтобы в широтах j £ 60°:
· включенный
в соответствии с инструкцией гирокомпас пришел в меридиан за время не более 6
ч при бортовой и килевой качках с периодом колебаний от 6 до 15 с, амплитудой
5° и максимальном горизонтальном ускорении 0,22 м/с 2 ;
· остаточная
постоянная погрешность после ввода коррекции за скорость и курс при скорости
20 уз не должна превышать ±0,25° sec j ;
· погрешность,
вызванная быстрым изменением скорости, при начальной скорости 20 уз не должна
превышать ±2°;
· погрешности,
вызванные бортовой и килевой качкой с периодом колебаний от 6 до 15с,
амплитудами 20°, 10° и 5° соответственно при максимальном горизонтальном
ускорении, не превышающем 1 м/с 2. и рысканием судна должны быть не
более 1° sec j.
Максимальное
расхождение в отчетах между основным прибором гирокомпаса и репитерами в
рабочем состоянии не должно превышать ±0,5°.
По своему
характеру погрешности гирокомпаса принято делить на методические и инструментальные. Основными методическими погрешностями
являются скоростная и инерционная
Скоростной погрешностью гирокомпаса называется
постоянное в данной широте азимутальное отклонение оси гирокомпаса от
истинного меридиана, происходящее
вследствие движения судна с постоянной скоростью на постоянном курсе.
Скоростная
погрешность имеет полукруговой характер, для курсов северной половины
горизонта она отрицательна, южной — положительна. В большинстве конструкций
гирокомпасов она исключается автоматическими или полуавтоматическими
корректорами. В некоторых конструкциях скоростная погрешность исключается только из показаний принимающих.
Инерционные погрешности гирокомпаса вызываются
возмущающими моментами сил инерции, возникающими при ускоренном движении судна.
При появлении моментов этих сил ось гирокомпаса выходит из своего положения
равновесия и совершает прецессионное движение со скоростью, зависящей от
значения момента силы инерции. Инерционная девиация проявляется в форме
затухающих колебаний после окончания маневра судна (курсом и/или скоростью).
Образующаяся
в результате маневра переменная погрешность называется инерционной
погрешностью гирокомпаса. Она свойственна большинству современных
гирокомпасов независимо от их конструкции.
Различают
инерционную погрешность с выключенным на время маневра успокоителем и
инерционную погрешность с включенным успокоителем. Первую иногда называют баллистической погрешностью первого рода ,
вторую (в частном случае выполнения условия апериодических переходов) — баллистической погрешностью второго рода ,
или погрешностью ускорения-затухания.
Наибольшее
значение инерционная погрешность первого рода имеет в момент окончания
маневра. Инерционная погрешность второго рода достигает наибольшей величины
приблизительно через 20—25 мин после окончания маневра.
На практике
в условиях часто повторяющихся маневров какие-либо расчеты по определению
инерционных погрешностей производить нецелесообразно. Однако судоводитель
должен критически оценивать их возможную величину и характер изменения. Для
этого необходимо учитывать следующее:
· инерционные
погрешности носят гироскопический характер, т. е. возникают не сразу после
появления инерционных возмущений и исчезают не сразу после их прекращения;
· изменение
инерционных погрешностей во времени после прекращения действия возмущающих
факторов происходит по законам собственных колебаний гирокомпаса, т. е. с тем
же периодом и фактором затухания;
· для
транспортных судов величина инерционной погрешности в средних широтах после
однократных маневров обычно не превышает 2—3°;
· показания
гирокомпаса следует считать ошибочными в течение 40—50 мин после окончания
маневра. В особо сложных условиях (при плавании в высоких широтах и на
больших скоростях) инерционная погрешность может сохраняться в течение 1,5 ч
после маневрирования;
· существенные
инерционные погрешности появляются при полу циркуляции судна с курса 0° или
180°, а также при зигзагообразном маневрировании на четвертных генеральных курсах;
· при
отсутствии выключателя затухания инерционная погрешность гирокомпаса
принципиально не может быть устранена;
· выключение
успокоителя колебаний гирокомпасов с нерегулируемым периодом целесообразно в
широтах меньше расчетной (для отечественных конструкций меньше 60°);
· при
пеленговании ориентиров с помощью гирокомпаса инерционная погрешность должна
рассматриваться как систематическая (повторяющаяся) ошибка, если срок
наблюдений значительно меньше периода собственных колебаний гирокомпаса;
· при
счислении пути по гирокомпасу инерционная погрешность должна рассматриваться как
случайная ошибка курсоуказания;
· при сложном
маневрировании (плавании по извилистым фарватерам, во льдах и т. д.) возможно
наложение инерционных погрешностей или накопление их до существенного
значения, зависящего от широты плавания. В широтах 75—80° это значение может
составлять ± 10 — 15° для обычных неапериодических компасов.
Инструментальные погрешности
гирокомпаса с жидкостным подвесом ЧЭ складываются из инструментальных
погрешностей основного прибора, следящей системы, корректирующих устройств,
дистанционной передачи и принимающих приборов.
Инструментальная
погрешность основного прибора современных гирокомпасов обычно не превышает
±0,3°.
Погрешность,
вносимая следящей системой, практически может рассматриваться как случайная,
поскольку она зависит от многих, трудно учитываемых факторов.
В
гирокомпасах с косвенным управлением основными источниками инструментальных
погрешностей основного прибора являются дефекты следящих систем и устройства
управления гироскопом.
Одногироскопные
гирокомпасы с торсионным подвесом могут иметь специфическую установившуюся
погрешность, пропорциональную статической ошибке следящей системы. В реальных
условиях плавания предельная величина случайной погрешности, которая может
быть внесена следящей системой, не превышает ±1,0°.
Погрешность,
вносимая корректором, складывается из случайной погрешности, вызываемой
люфтами и несоответствием геометрических размеров передач, и систематических
погрешностей за счет неточного ввода истинной скорости и широты.
Случайная
погрешность корректора обычно оценивается предельными значениями ±(0,2- 0,3)°.
Систематическая
погрешность за счет не точного ввода истинной скорости, что может иметь место
при" неизвестном течении или неизвестной поправке лага, обычно невелика.
Систематическая
погрешность за счет неточного ввода широты может достигать существенного
значения.
Для ее
уменьшения при плавании в высоких широтах следует производить установку
корректора по широте через каждый градус изменения широты или менее.
Погрешность
за счет дистанционных передач гирокомпаса обычно рассматривается как
случайная. Её предельное значение не превышает ±0,2° и статическом режиме, но
может достигать нескольких градусов в динамическом режиме, что следует иметь
в виду при пеленговании объектов на циркуляции или после резкого изменения
курса
Погрешности
принимающих приборов могут быть разделены на систематические и случайные.
Систематические обычно не превышают ±0,2° (без учета погрешности за счет
неточной установки пелоруса) Предельное значение случайных погрешностей имеет
такой же порядок.
К
инструментальным погрешностям двухгироскопных компасов может быть отнесена и
наблюдаемая на качке четвертная погрешность (у одногироскопных гирокомпасов с
гидравлическим маятником ее следует рассматривать как методическую). Причиной
этой погрешности является перемещение ЦТ чувствительного элемента на качке за
счет изменения уровня имеющихся внутри него жидких масс, главным образом
уровня масла в успокоителе колебаний. Величина этой погрешности зависит от
конструкции успокоителя и для отечественных гирокомпасов типа «Курс» не
превышает ±0,5° (при отсутствии собственного движения судна).
Поправки и точность показаний
гирокомпаса. Совокупность перечисленных выше погрешностей
образует суммарную погрешность гирокомпаса, подразделяемую на систематическую
и случайную составляющие. На практике такое разделение не имеет большого
значения, поскольку, как правило, общая поправка определяется при однократных
наблюдениях или в течение слишком коротких промежутков времени, чтобы можно
было произвести эффективную обработку измерений (Оптимальный интервал между
наблюдениями при определении общей поправки гирокомпаса составляв 10—15 мин
при общем времени наблюдений 1,5—3 ч).
Однако
следует иметь в виду, что за счет случайных и переменных систематических
ошибок значение общей поправки гирокомпаса в какой либо момент времени может
существенно отличаться от значения, выведенного при последних наблюдениях. По
этой причине, в частности, при пеленговании объектов в условиях длительного
маневрирования или вскоре после окончания маневра (например, после выхода из
порта), не следует принимать во внимание общую поправку, определенную до
производства маневра (Имеются в виду обычные неапериодические гирокомпасы).
С другой
стороны, изменение общей поправки в течение некоторого времени после
маневрирования не следует считать признаком неисправной работы гирокомпаса.
Иногда допускается ошибка, когда общая поправка гирокомпаса определяется на
полном ходу с введенным в корректор значением скорости, а затем этой поправкой
пользуются на малом ходу, среднем или на стоянке (например, на якоре) без
ввода нового значения скорости в корректор. Другая ошибка возникает в тех
случаях, когда общая поправка определяется на стоянке, но с установленным на
корректоре значением скорости, при этом ошибочно предполагается, что на ходу
поправка компаса будет правильной.
Во всех
случаях следует руководствоваться следующим правилом введенная в корректор
скорость должна всегда соответствовать действительной скорости судна.
Общая
поправка гирокомпаса определяется одним из принятых в навигации и мореходной
астрономии методов, а также с помощью радиотехнических средств.
Величина
средней квадратической погрешности общей поправки гирокомпаса составляет по
створам ±0,2°, по пеленгам береговых ориентиров ±0,4°, по небесным светилам
±0,4°